Motor Representation and Shared Intention
by Stephen A. Butterfill (8/28/2012), Collective Intentionality VII at University of Manchester
Slides


Abstract
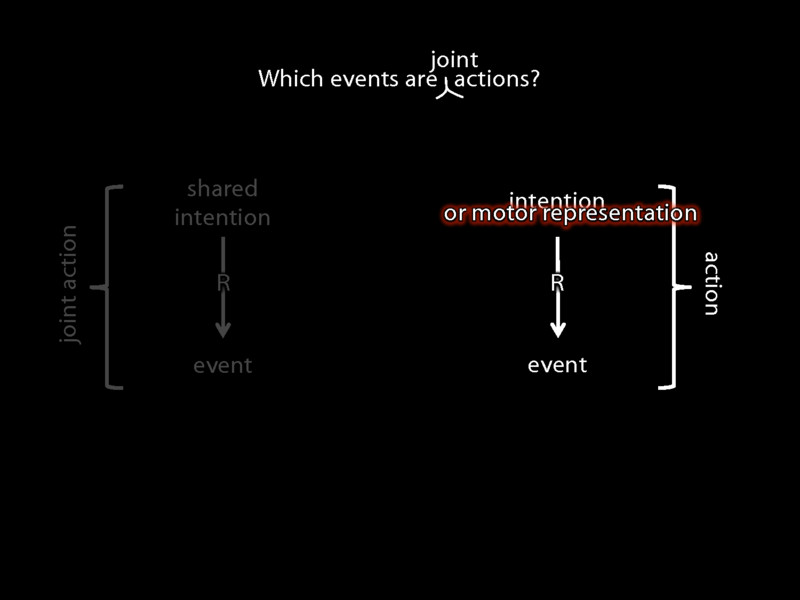
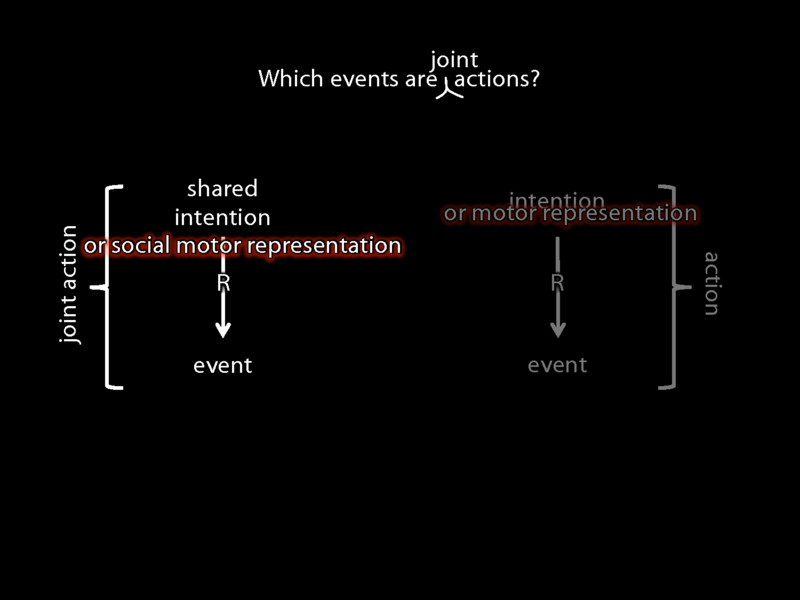
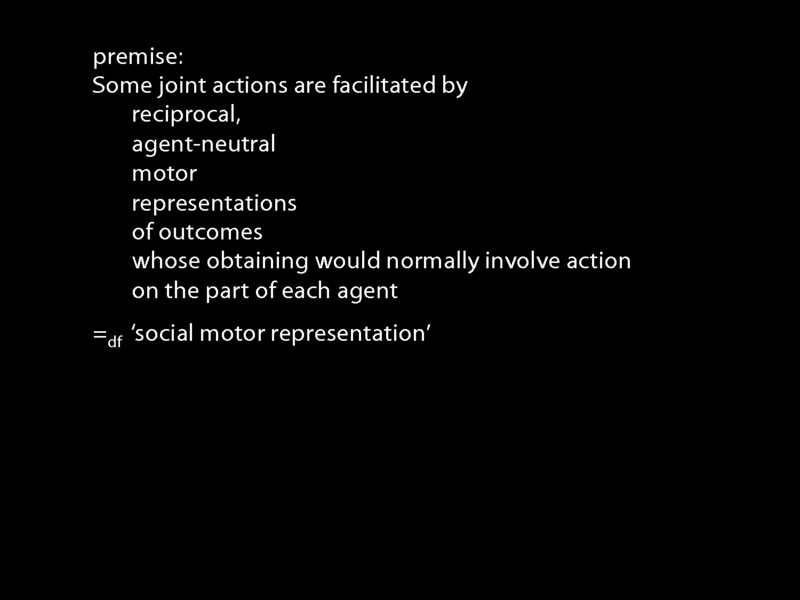
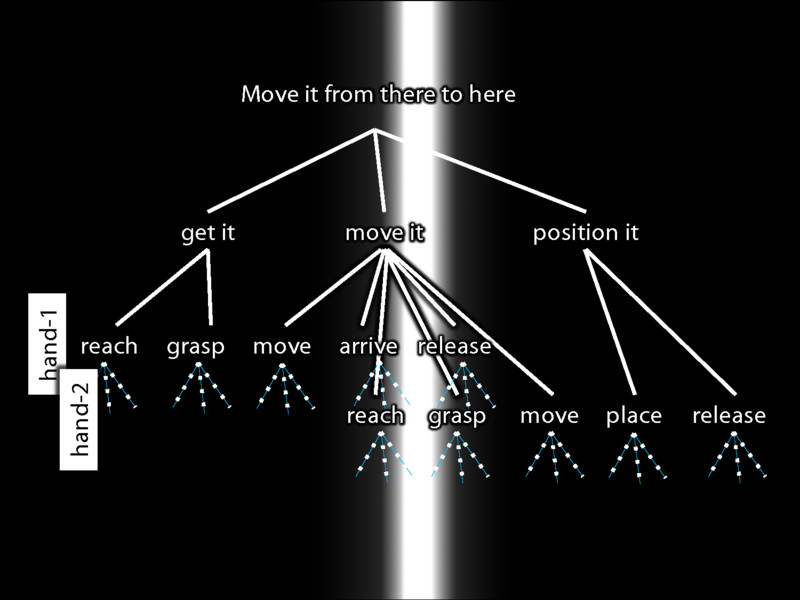
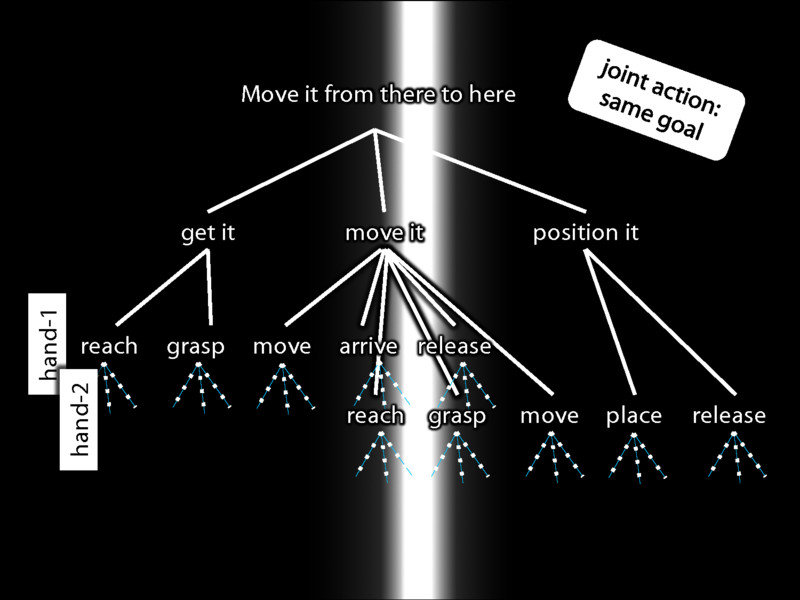
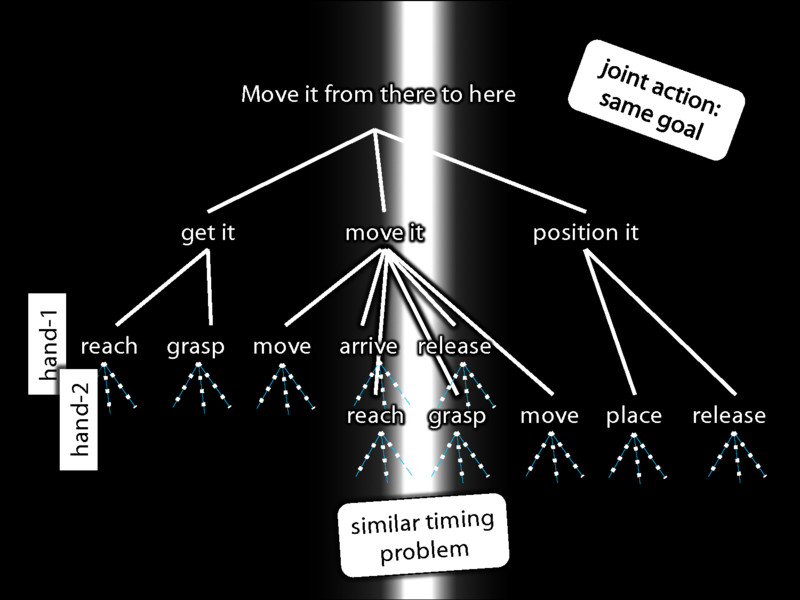
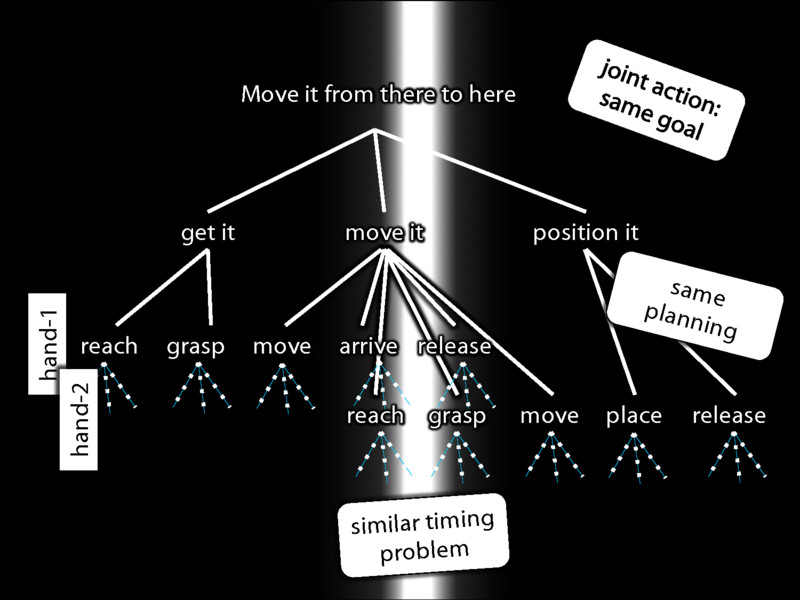
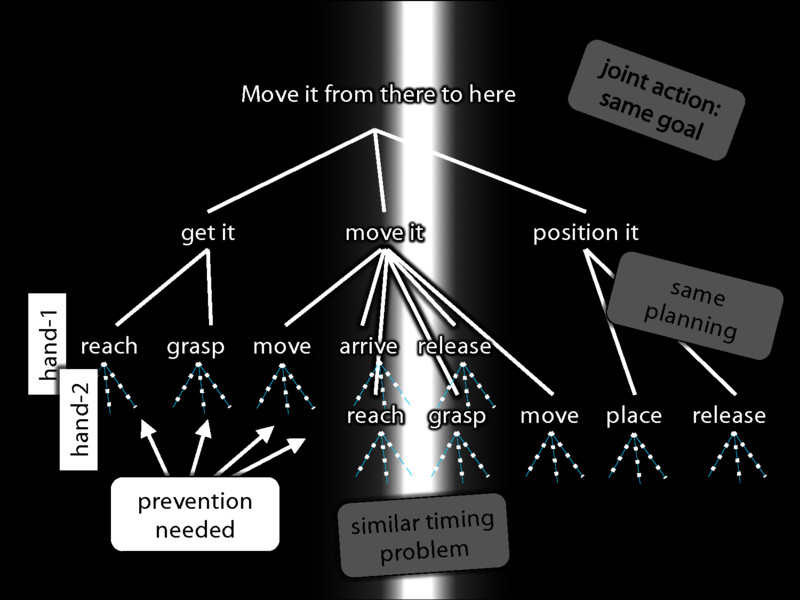
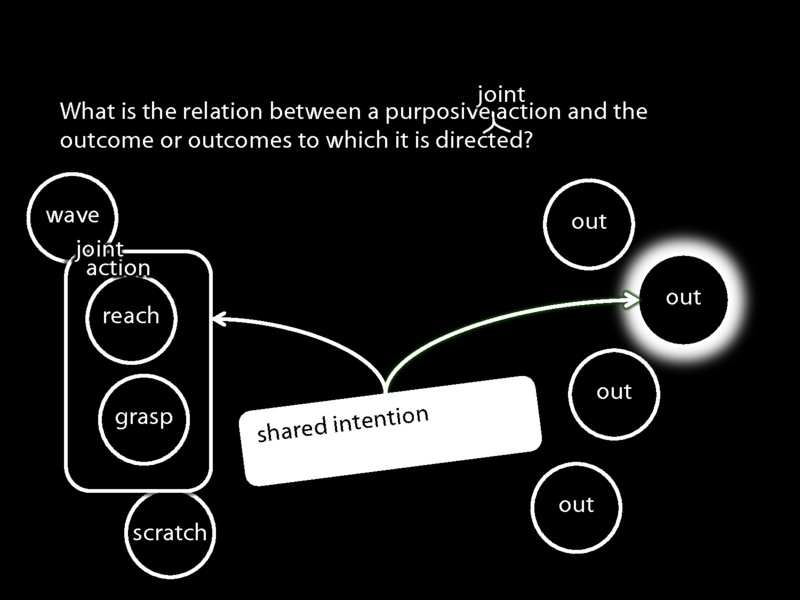
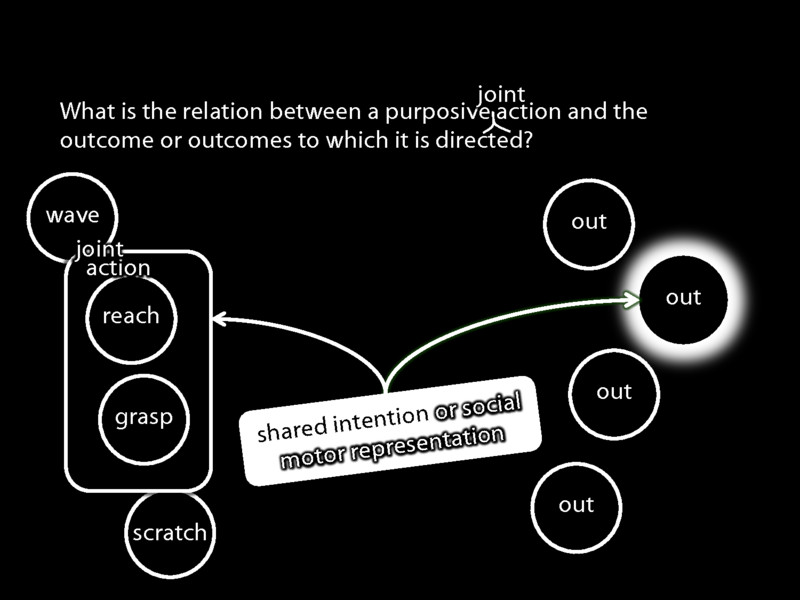
On the assumption that motor representation plays a role in explaining how effective joint action is possible, do we also need motor representation to explain what joint action is? Philosophers tend to assume that motor representation is only an enabling condition for joint action and of no direct interest to narrowly philosophical theories of joint action and shared intention. In this talk I shall argue that social motor representation and shared intention have distinctive roles in explaining the purposiveness of joint action. This gives rise to a challenge. On the one hand, effective joint action—imagine two people erecting a tent in a gale together—sometimes requires both shared intentions and social motor representations plus a certain kind of harmony between the two. On the other hand, recognizing their distinctive roles precludes the existence of direct inferential links between shared intentions and social motor representations. The challenge is to explain how these two kinds of representation could sometimes harmoniously contribute to effective joint action despite the lack of inferential integration.