\title {Origins of Mind: Lecture Notes \\ Joint Action}
\maketitle

Joint Action
[email protected]
\def \ititle {Origins of Mind}
\def \isubtitle {Joint Action}
\
\begin{center}
{\Large
\textbf{\ititle}: \isubtitle
}
\iemail %
\end{center}
What is joint action?
One way to get an initial, pre-theoretical fix on the notion is to adapt an idea from David Pears and think about contrasts between joint actions and parallel but merely individual actions.
\section{Joint Action vs Parallel but Merely Individual Action}
\section{Joint Action vs Parallel but Merely Individual Action}
Two sisters cycling to school together are engaged in a joint action,
whereas two strangers who happened to be cycling the same route side-by-side would not be (compare \citealp{gilbert_walking_1990}).
Two sisters cycling to school together exercise shared agency whereas two strangers who happened to be cycling the same route side-by-side do not (compare \citealp{gilbert_walking_1990}).
Similarly, when members of a flash mob in the Central Cafe respond to a pre-arranged cue by noisily opening their newspapers, they perform a joint action.
But when someone not part of the mob just happens to noisily open her newspaper in response to the same cue, her action is not part of any joint action.%
\footnote{
See \citet{Searle:1990em}; in his example park visitors simultaneously run to a shelter, in once case as part of dancing together and in another case because of a storm.
Compare \citet{Pears:1971fk} who uses contrast cases to argue that whether something is an ordinary, individual action depends on its antecedents.
}
When members of a flash mob respond to a pre-arranged cue by noisily opening their newspapers, they exercise shared agency. But when others happen to noisily open their newspapers in response to the same cue, they do not \citep[compare][]{Searle:1990em}.
These and other contrast cases invite the question,
\textbf{What distinguishes joint actions from parallel but individual actions?}
\textbf{Question} What distinguishes joint actions from parallel but individual actions?
The first contrast case shows that the difference can’t be just a matter of coordination because people who merely happen to be cycling side-by-side also need to coordinate their actions in order to avoid colliding.
Note also that in both cases each individual's cycling is intentional, so our intentionally cycling together cannot be only a matter of our each intentionally cycling.

The second contrast case shows that the difference can’t just be that the resulting actions have a common effect because merely parallel actions can have common effects too.
At this point it is natural to appeal to intention.
If we are performing actions of some type phi,
then perhaps for our doing this to be a joint action is just for us to be doing this
because we each intend that we, you and I, phi together.
Does the appeal to togetherness make this circular? Not as long as we understand 'together' only in the sense in which the three legs of a tripod support the flask \emph{together}.
So we have to understand the intention as concerning an event type that could be a joint action but might also involve merely parallel actions.
\textbf{Simple Account}
(Intentional) joint action occurs when there is an act-type, φ, such that each of several agents intends that they, these agents, φ.
This certainly distinguishes the cases on your left from those on your right.
But we can see that the Simple Account is too simple as it stands by adapting an example from Gilbert and Bratman ...
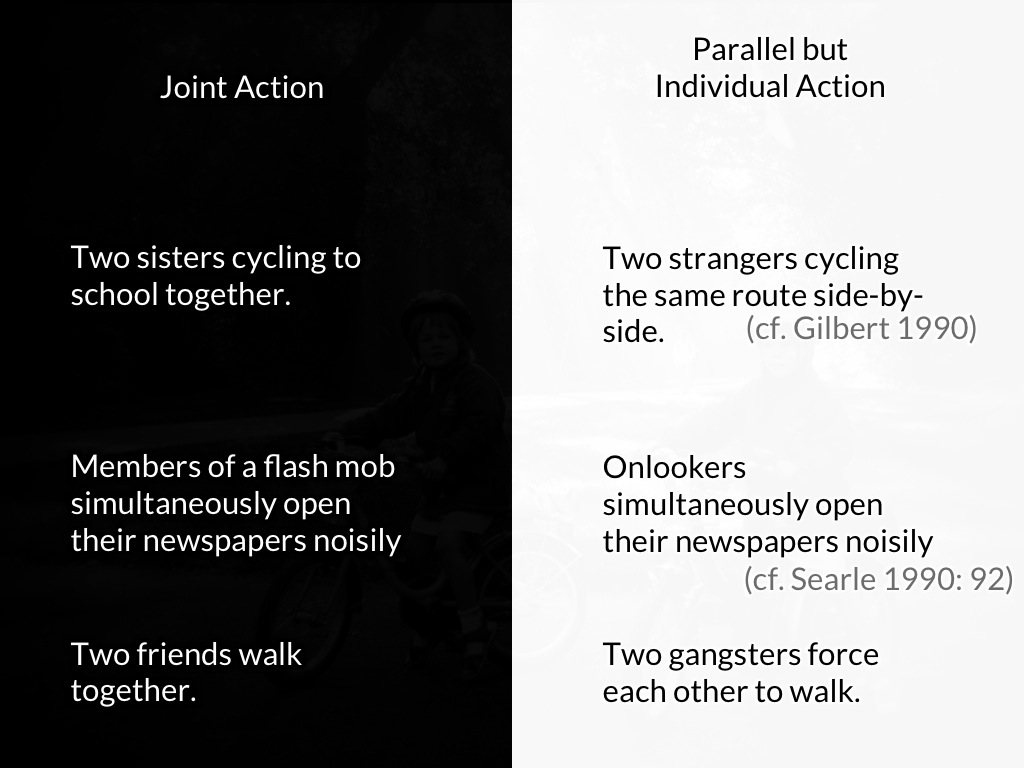
Contrast two friends walking together in the ordinary way,
which is a paradigm case of collective agency,
with a situation where two gangsters walk together but each is forcing the other.
It works like this: Gangster 1 pulls a gun on Gangster 2 and says: “let’s walk”
But Gangster 2 does the same thing to Gangster 1 simultaneously.
This is walking together in the Tarrantino sense,
and clearly not a case of joint action.
At least it’s not joint action unless the central event of of Reservoir Dogs is also a case of joint action.
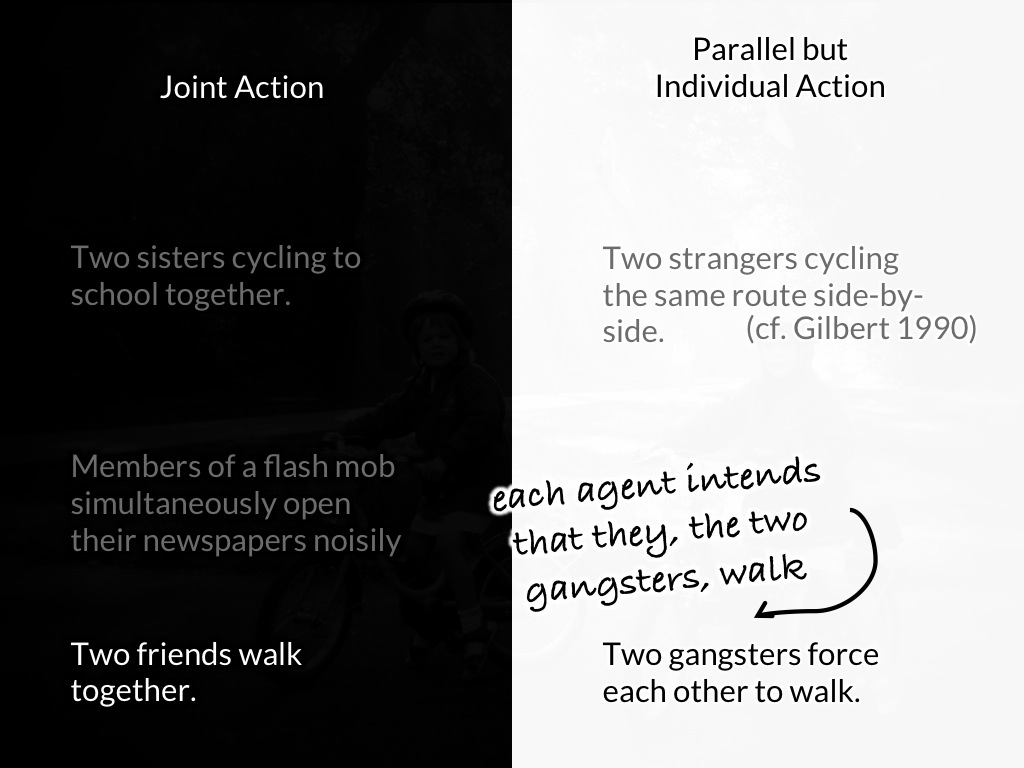
Since in this case there is something which all the agents involved intend, it seems that our being involved in a joint action can't be a matter only of there being something such that we each intend that we do it together.
The apparent difficulty of giving sufficient for shared intention has motivated some
philosophers to invoke conceptually novel ingredients in explaining intentional joint action,
novel ingredients such as plural subjects of attitudes \citep[e.g.][]{schmid:2009_plural_bk},
special attitudes like what Searle calls a we-intention \citep[e.g.][]{Searle:1990em},
or novel kinds of reasoning, team reasoning \citep{Gold:2007zd}.
One way to oppose the claim that any such special ingredients are needed is to argue that
sufficient conditions for intentional joint action can be given without them.
This is Bratman's project. He wants to show that our question, What distinguishes joint action
from parallel but merely individual action, can be answered without appeal to any
conceptually novel ingredients.
\section{Bratman on Shared Intention}
\section{Bratman on Shared Intention}
\section{Counterexample to Bratman}
\section{Counterexample to Bratman}

Here is an example of two people who have an unshared intention.
Ayesha and Ahmed. They can each tilt the table, but only along one axis.
(Note that Ayesha can unilaterally intend that they, Ayesha and Ahmed, make the ball hit the red square.)
If you think Ayesha and Ahmed are having a bad hair day, you should see Beatrice and Baldric ...

Now explain that Ayesha and Ahmed have an unshared intention, but Beatrice and Baldric have a shared intention.
I claim that Beatrice and Baldric have a shared intention that they J$_1$
only if
Ayesha and Ahmed have a shared intention.
This claim follows from the similarities of the two cases.
The only difference is that Beatrice and Baldric happen to have same task, whereas Ayesha and Ahmed have different tasks.
But neither Beatrice nor Baldric makes use of the fact that they have the same task.
So if we consider how
Beatrice and Baldric's case
differs from
Ayesha and Ahmed’s,
we can see that these differences do not plausibly amount to a difference with respect to shared agency.
Shared intention cannot feature in one case but not the other.
Now so far I've said that that BnB have a shared intention only if AnA do:
this isn't yet to say that BnB don't have a shared intention.
I do think it's intuitive that they lack a shared intention, however.
What could be missing from Beatrice and Baldric's case that makes their actions not an exercise of shared agency?
I think one factor is that they don't themselves conceive of their agency as in any relevant way shared, nor of their actions as joint actions.
Lots of actions involve others' agency without thereby being exercises of shared agency.
From Beatrice and Baldric's points of view, theirs is just such an action.
From their point of view, what they are doing no more involves shared agency than do the actions of a golfer whose hole-in-one depends on the hard work of a gardener keeping the grass short and flat.
perhaps I could make it more convincing that it isn't shared agency by filling in some
detail about why Beatrice intends that *they*. (Perhaps there's some further rule that Baldric
will be punished if they make the ball hit the blue cross and she wants Baldric to be
punished so it matters to Beatrice that it's they not just her who makes the ball hit the
blue cross, but for reasons that don't point to shared agency.)
\section{Parallel Planning}
\section{Parallel Planning}

Suppose you and I are tasked with moving this table through that door.
In doing this, must my plan take into account facts about your intentions as well as about the weight of the table, width of the door &c?
This case has some special features: (i) there is a single most salient route for the table given our objective; (ii) there is a single most salient way of dividing up the roles between us.
I suggest that, in this situation, neither of us needs to form a plan involving the others' intentions.
The situation makes this redundant.
All we have to plan is how two people in our situations should move the table through the door.
To a first approximation, then, what the situation seems to call for is not that our plans are
interconnected but rather that we each make a plan for the table-moving action as a whole.
This is inspiration for the view that we might arrive at sufficient conditions by reflecting on
parallel rather than interconnected planning ...

‘al agency consists, at bottom, in interconnected planning agency of the participants.’
(Bratman 2011, p. 11)
Facts about your plans feature in my plans & conversely.
parallel planning
You plan my actions as well as yours, and I do likewise.
This is why, despite appearances, I think the notion of parallel planning is coherent.
Without irrationality or ignorance, it is possible for us each to plan all of our actions, yours and mine, and to act on these plans.
In doing so we achieve coordination and manifest collective intentionality not by thinking about each other's plans but, more directly, by planning each other's actions.
Let me return for a moment to the Tarantino walkers and what I was calling the Simple Account of shared intention.
According to the Simple Account, we have a shared intention that we walk just if we each intend that we, you and I, walk.
Now, as you may recall, earlier I noted that this seemed not sufficient because we might have and act on such intentions while forcing each other to walk at gunpoint.
It is this problem that Bratman uses to invoke interconnected planning.
But actually we can see that the problem can also be overcome by invoking parallel planning.
Consider the view that for us to exercise shared agency in walking together it is sufficient that:
\begin{enumerate}
\item we each intend that we, you and I walk;
\item we pursue these intentions by means of parallel planning (that is, we each plan all our actions and our plans match); and
\item we each end up with open-ended intentions concerning the components of our plans.
\end{enumerate}
This view rules out the Tarantino walkers (who each point a gun at the other) because pursuing an intention by means parallel planning means taking a practical attitude towards each other's actions.
So, if my conditions are met, your pointing a gun at me would be almost like your pointing a gun at yourself in order to force yourself to do something you intend.
[*skip] One more thing about interconnected and parallel planning.
Earlier I noted that interconnected planning is demanding in two respects: it's demanding with respect to which mechanisms can underpin shared agency, and with respect to which agents can exercise shared agency.
By contrast, parallel planning is not demanding in these respects.
In parallel planning, I don't make plans about your plans, I simply plan your actions.
So it does not demand mechanisms which are capable of meta-planning, nor agents capable of understanding and thinking about others' plans.
Recognising a role for parallel planning in shared agency may thus allow us to understand exercising shared agency might not presuppose deep insights into the nature of minds,
and so tempt us to consider the conjecture that it is through acting together that we first come to understand other minds.
But that is another talk ...
Now so far I've been arguing only that (i) the notion of parallel planning is coherent,
(ii) that parallel planning enables us to coordinate our actions, and (iii) that appeal to
parallel planning might be useful for explaining shared agency because it gives us a way of
ruling out some counterexamples.
But that doesn't, by itself, amount to showing that the notion of parallel planning can
is any more useful than that of interconnected planning.
For all I've said so far, it might be that both parallel and interconnected planning play a
role in corrdinating actions, but neither can be used to give sufficient conditions for
intentional joint action.
Can I do better?
With this notion of parallel planning in mind, I want to return to my counterexample to Bratman's view.
Recall Beatrice and Baldric who had interlocking plans.
Since (by stipulation) they each avoid conceiving of their actions as even potentially parts of
a single planning process,
at any point in time each is taking the perspective of an outsider on either her own or the
other’s actions.
To see that there really is no shared agency, contrast these two with Caitlin and Ciaran
who engage in parallel planning for J1 ...

Here are Caitlin and Ciaran. Each makes a plan for all the actions, the actions the other will
eventually perform as well as the actions she herself will perform.
So there is a sense in which they see their actions as having a kind of practical unity, and
for this reason their case involves a joint action.
\section{Motor Representation in Joint Action}
\section{Motor Representation in Joint Action}
Let me start by stepping back and consider an individual action.
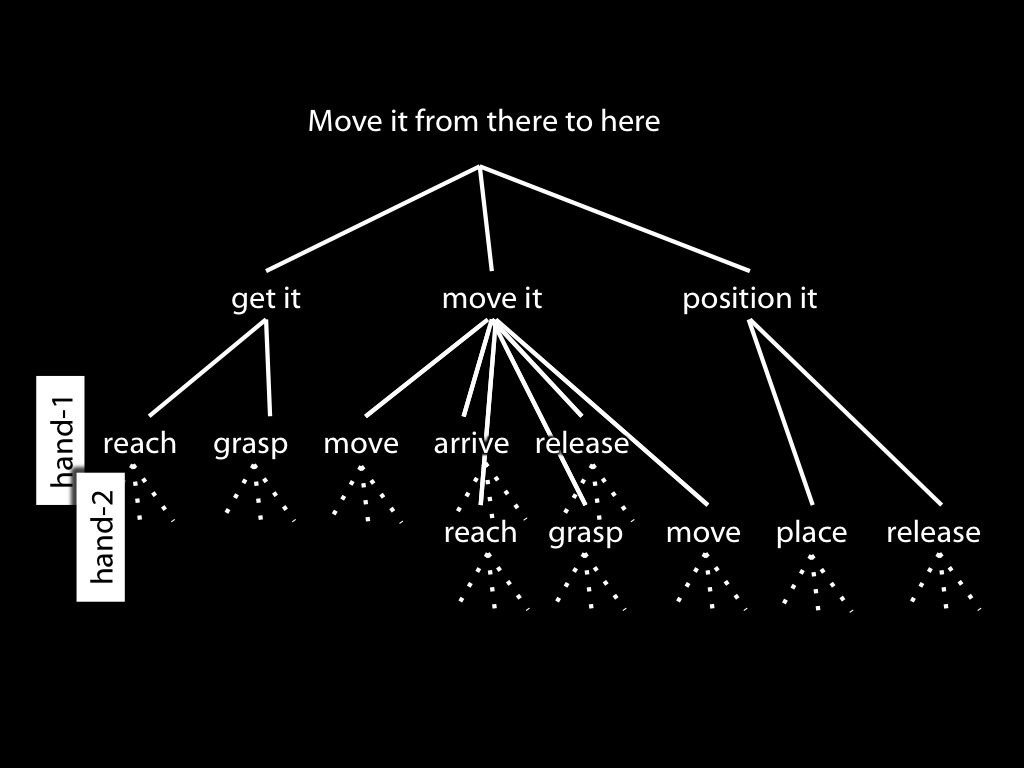
An agent moves a mug from one place to another, passing in from her left hand to her right hand half way [*demonstrate].
It’s a familiar idea that motor representations of outcomes resemble intentions in that they can trigger processes which are like planning in some respects.
These processes are like planning in that they involve starting with representations of relatively distal outcomes and gradually filling in details, resulting in a structure of motor representations that can be hierarchically arranged by the means-end relation \citep{bekkering:2000_imitation,grafton:2007_evidence}.
Processes triggered by motor representations of outcomes are also planning-like in that they involve selecting means for actions to be performed now in ways that anticipate future actions \citep{jeannerod_motor_2006,zhang:2007_planning,rosenbaum:2012_cognition}.
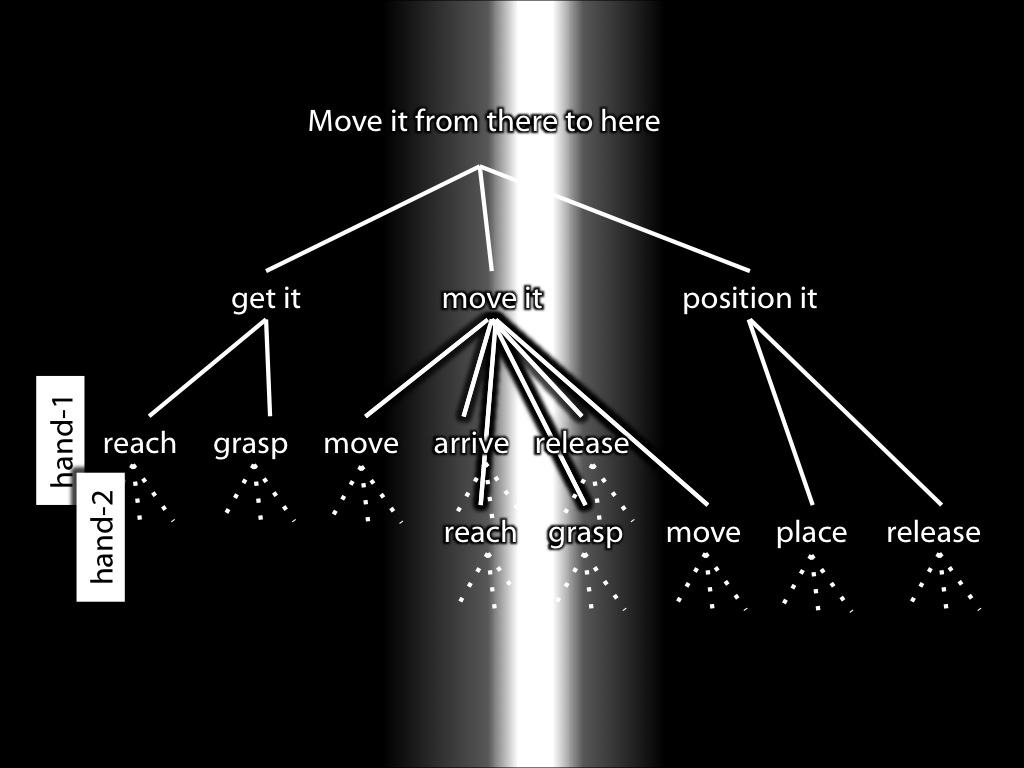
Now in this action of moving a mug, there is a need, even for the single agent, to coordinate the exchange between her two hands.
(If her action is fluid,
she may proactively adjust her left hand in advance of the mug’s being lifted by her right hand \citep[compare][]{diedrichsen:2003_anticipatory,hugon:1982_anticipatory, lum:1992_feedforward}.)
How could such tight coordination be achieved?
Part of the answer involves the fact that motor representations and processes concerning the actions involving each hand are not entirely independent of each other.
Rather there is a plan-like structure of motor representation for the whole action and motor representations concerning actions involving each hand are components of this larger plan-like structure.
It is in part because they are components of a larger plan-like structure that the movements of one hand constrain and are constrained by the movements of the other hand.
But how is any of this relevant to the case of joint action?
Outcomes are represented motorically not only in performing an action but sometimes also in observing another agent perform that action.
in observing others act
motor planning* for others’ actions occurs
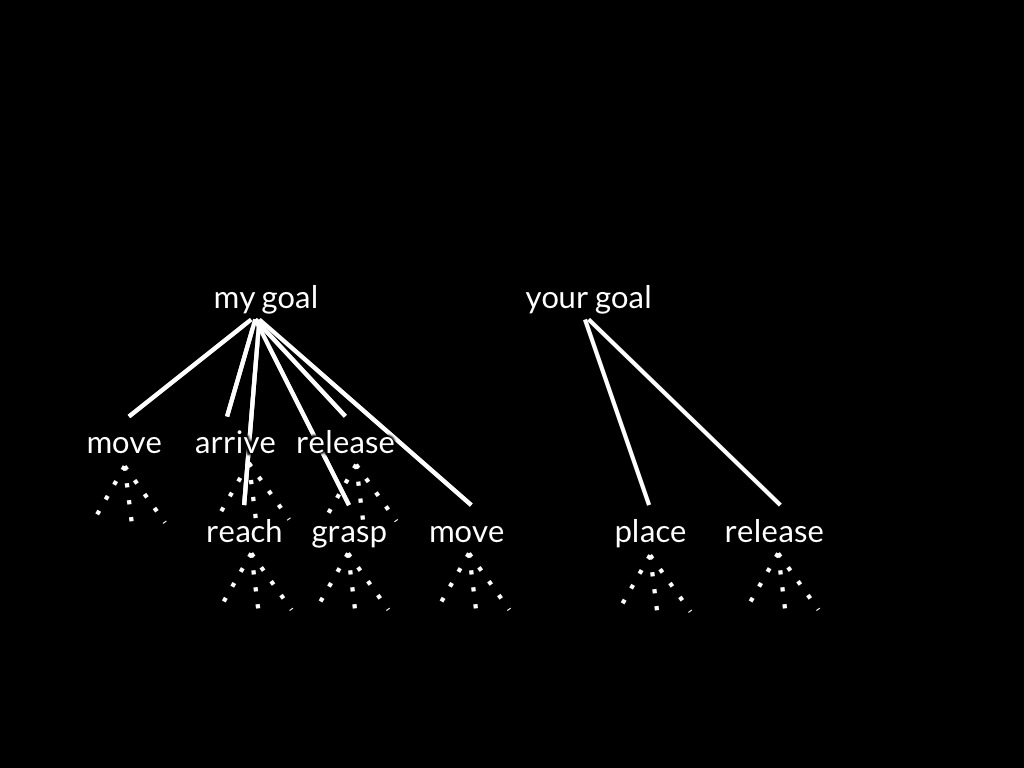
Like this [image of two separate plans].
So my thought is that something analogous to parallel planning can involve motor processes
rather than practical reasoning. Let me say one more thing to complete the picture ...
Motor representations concern not only bodily configurations and movements but also more distal outcomes such as the grasping of a mug or the pressing of a switch \citep{butterfill:2012_intention,hamilton:2008_action,cattaneo:2009_representation}.
Some motor processes are planning-like in that they involve deriving means by which the outcomes could be brought about and in that they involve coordinating subplans \citep{jeannerod_motor_2006,zhang:2007_planning}.
Motor processes concerning actions others will perform occur in observing others act \citep{Gangitano:2001ft}---and even in observing several others act jointly \citep{manera:2013_time}---and enables us to anticipate their actions \citep{ambrosini:2011_grasping,aglioti_action_2008}.
In joint action, motor processes concerning actions another will perform can occur \citep{kourtis:2012_predictive, meyer:2011_joint},
and can inform planning for one's own actions \citep{vesper:2012_jumping,novembre:2013_motor,loehr:2011_temporal}.
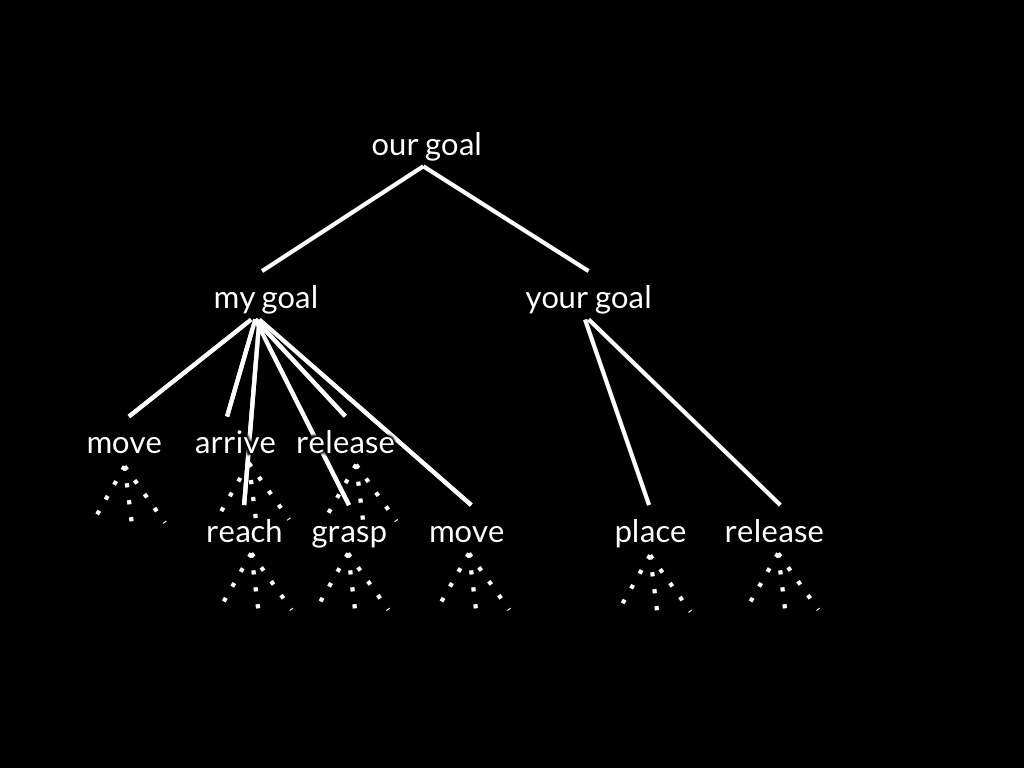
In some joint actions, the agents have a single representation of the whole action (not only separate representations of each agent's part) \citep{tsai:2011_groop_effect,loehr:2013_monitoring,Menoret:2013fk},
and may each make a plan for both their actions \citep{meyer:2013_higher-order}.
Earlier we considered what is involved in performing an ordinary, individual action, where an agent moves a mug from one place to another passing it between her hands half-way.
Compare this individual action with the same action performed by two agents as a joint action.
One agent takes the mug and passes it to the other, who then places it.
The joint action is like the individual action in several respects.
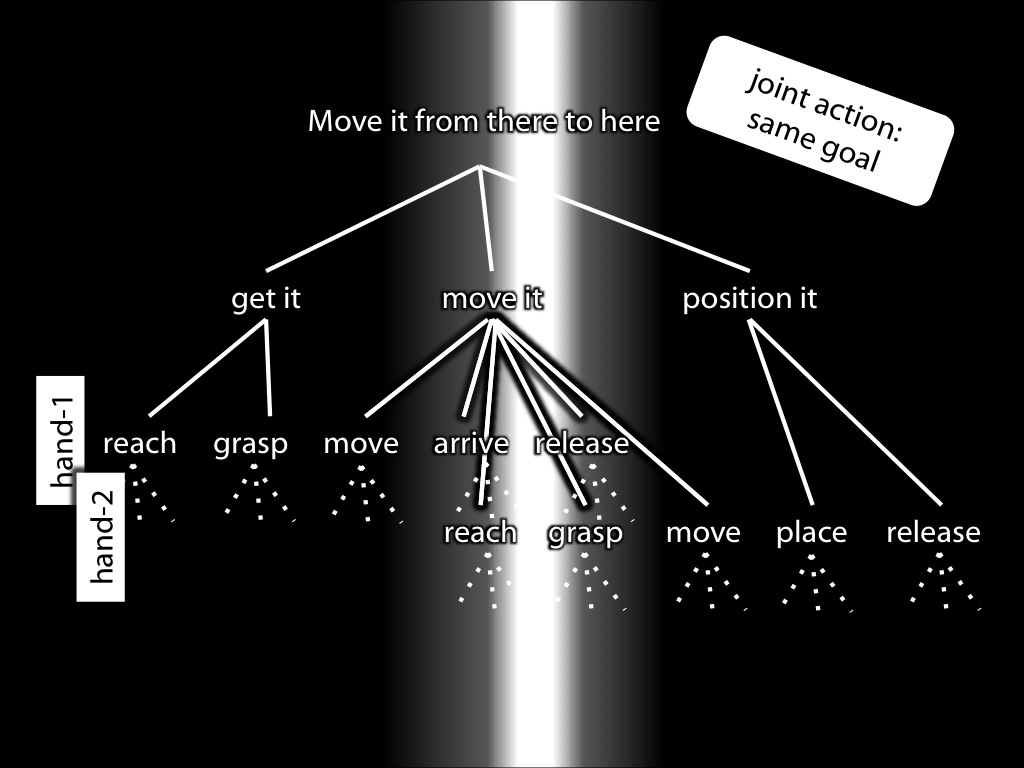
First, the goal to which the joint action is directed is the same, namely to move the mug from here to there.
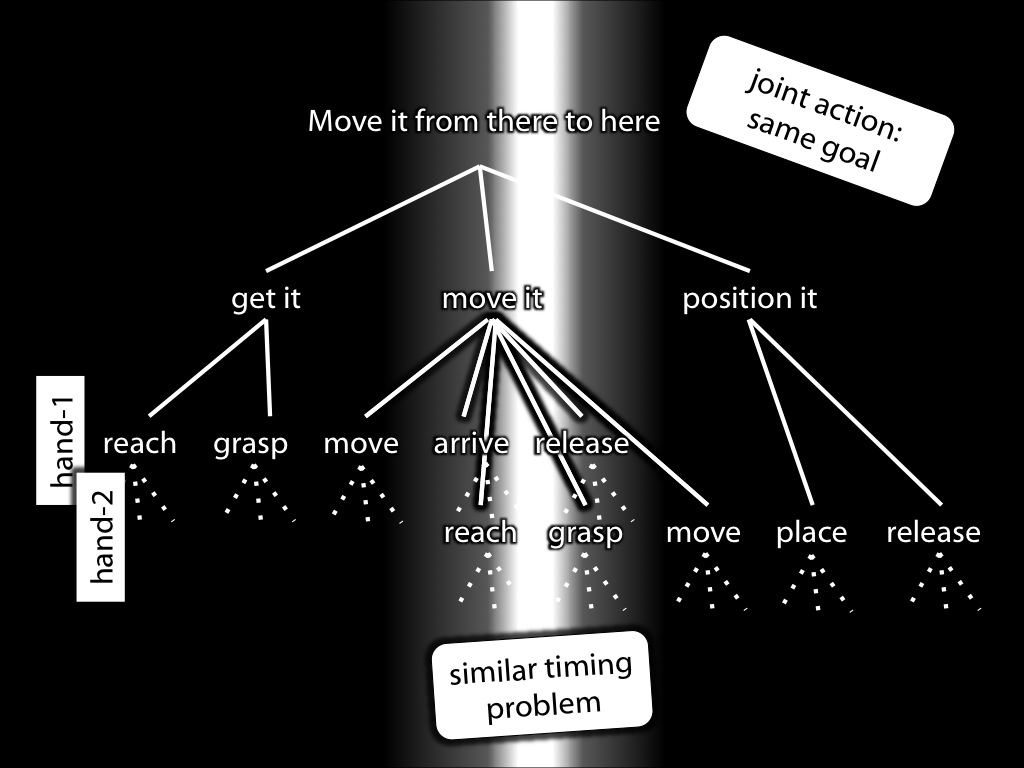
Second, there is a similar coordination problem---the agents’ two hands have to meet.
And, third, the evidence we have mentioned suggests that in joint action, motor representations and processes occur in each agent much like those that would occur if this agent were performing the whole action alone.
Why would this be helpful?
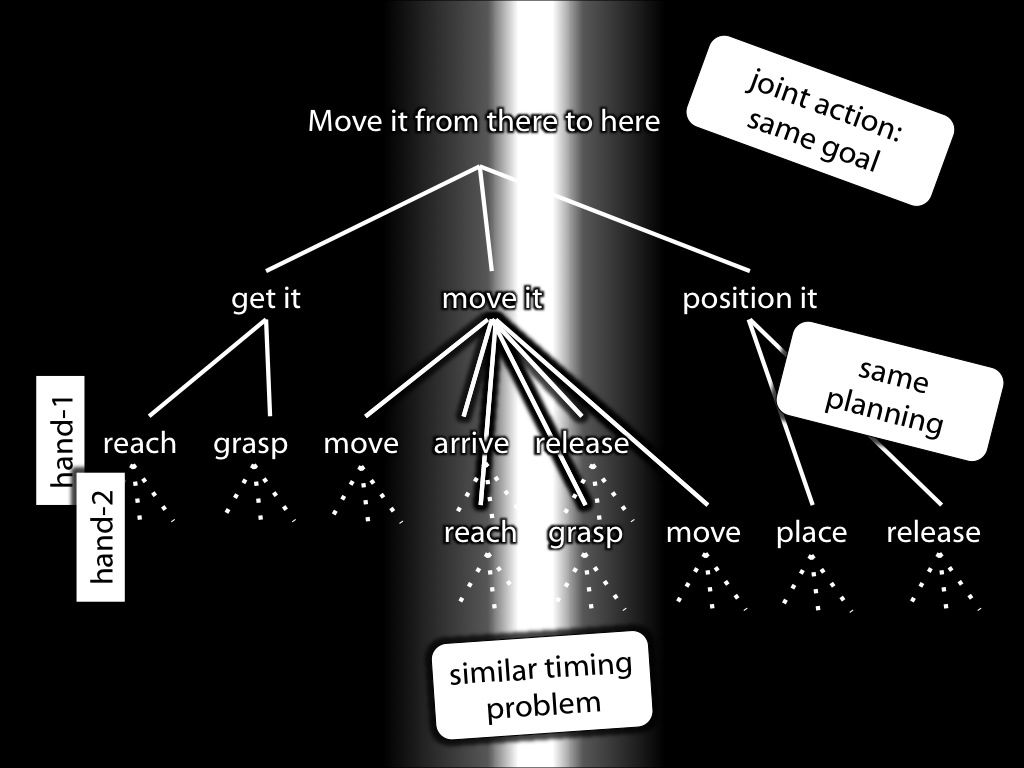
Suppose the agents' planning-like motor processes are similar enough that, in this context, they will reliably produce approximately the same plan-like structures of motor representations.
Then having a single planning-like motor process for the whole joint action in each agent means that
\begin{enumerate}
\item in each agent there is a plan-like structure of motor representations concerning each of the others’ actions,
\item each agent's plan-like structure concerning another's actions is approximately the same as any other agent's plan-like structure concerning those actions,
\item each agent's plan-like structure concerning her own actions is constrained by her plan-like structures concerning the other’s actions.
\end{enumerate}
So each agent’s plan-like structure of motor representations concerning her own actions is indirectly constrained by the other agents' plan-like structures concerning their own actions
by virtue of being directly constrained by her plan-like structures concerning their actions.
In this way it is possible to use ordinary planning-like motor processes to achieve coordination in joint action.
What enables the two or more agents' plan-like structures of motor representations to mesh is not that they represent each other's plans but that they processes motorically each other's actions and their own as parts of a single action.
So how does the joint action differ from the corresponding individual action?
There are at least two differences.
First, we now have two plan-like structures of motor representations because in each agent there is a planning-like motor process concerning the whole action.
These two structures of motor representations have to be identical or similar enough that the differences don’t matter for the coordination of the agents’ actions---let us abbreviate this by saying that they have to \emph{match}.
The need for matching planning-like structures is not specific to joint action;
it is also required where one agent observing another is able to predict her actions thanks to planning-like motor processes concerning the other’s actions (we mentioned evidence that this occurs above).
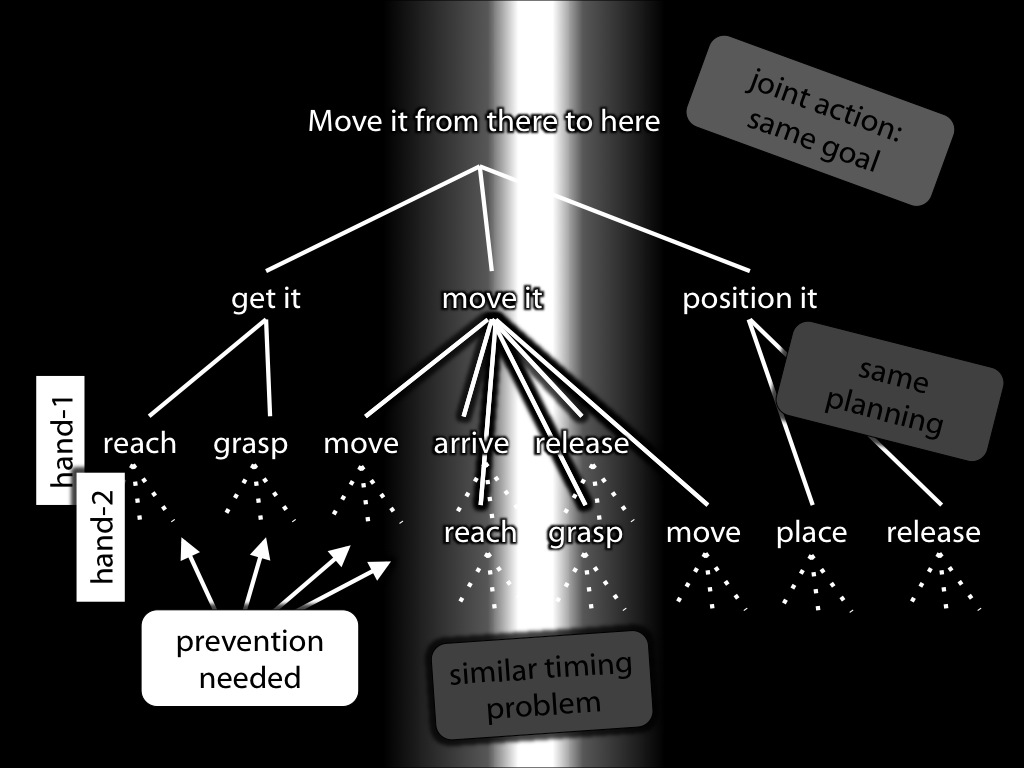
A second difference between the joint action and the individual action is this.
In joint action there are planning-like motor processes in each agent concerning some actions which she will not eventually perform.
There must therefore be something that prevents part but not all of the planning-like motor process leading all the way to action.
Exactly how this selective prevention works is an open question.
We expect bodily and environmental constraints are often relevant.
There may also be differences in how others’ actions are processed motorically \citep[compare][]{novembre:2012_distinguishing}.
\footnote{\citep[p.\ 2901]{novembre:2012_distinguishing}: 'in the context of a joint action—the motor control system is particularly sensitive to the identity of the agent (self or other) of a represented action and that (social) contextual information is one means for achieving this distinction'}
And inhibition could be involved too \citep[compare][]{sebanz:2006_twin_peaks}.
My proposal, then, is this.
In both practical reasoning and motorically, sometimes agents are able to achieve coordination
for joint action not by representing each others’ plans but
by treating each other's actions and their own as if they were parts of a single action.
So perhaps joint action is not always only a matter of intention, knowledge or commitment:
perhaps sometimes joint action constitutively involves motor representation.