And, third, the evidence we have mentioned suggests that in joint action, motor representations and processes occur in each agent much like those that would occur if this agent were performing the whole action alone.
Why would this be helpful?
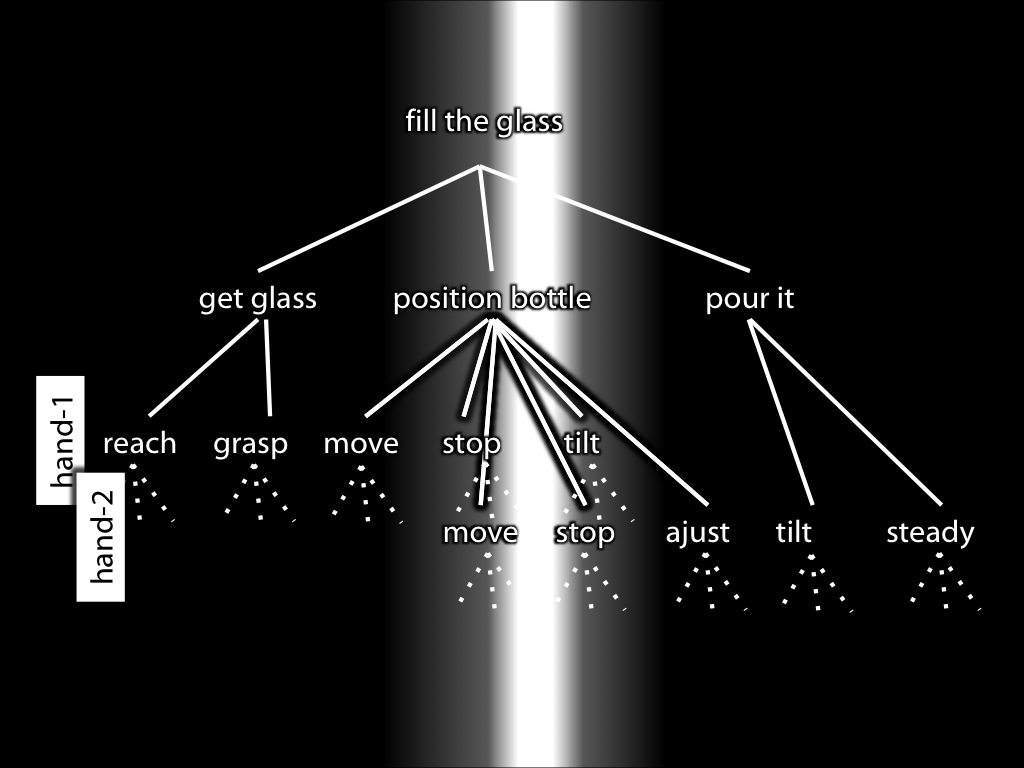
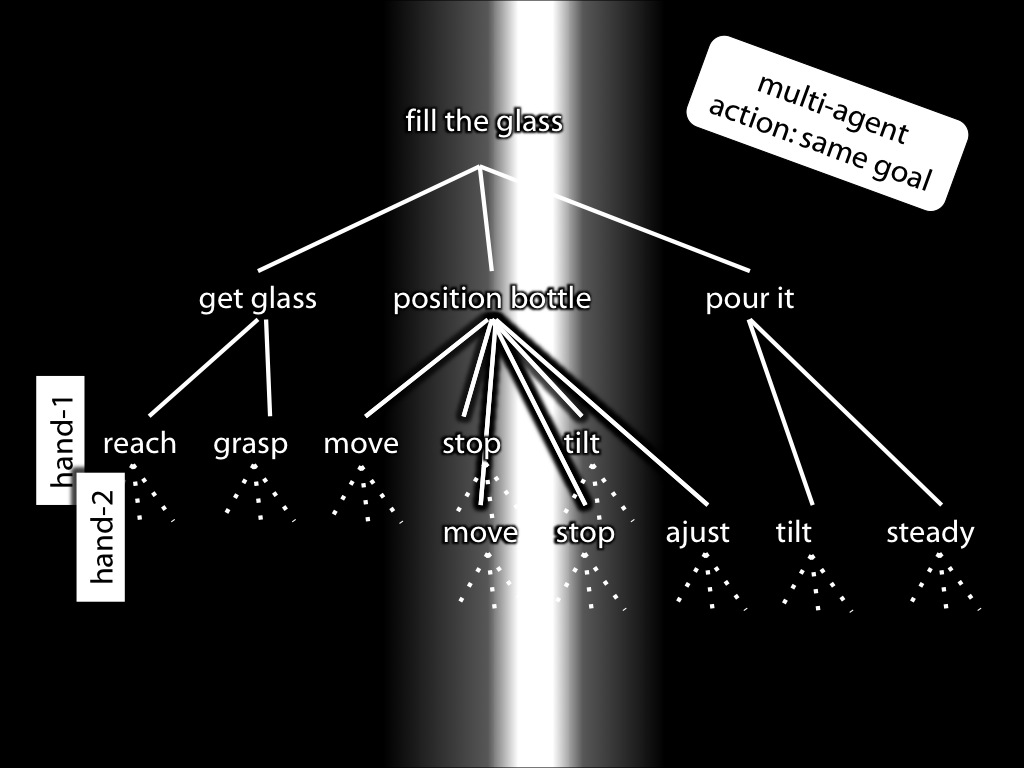
Suppose the agents' planning-like motor processes are similar enough that, in this context, they will reliably produce approximately the same plan-like structures of motor representations.
Then having a single planning-like motor process for the whole joint action in each agent means that
\begin{enumerate}
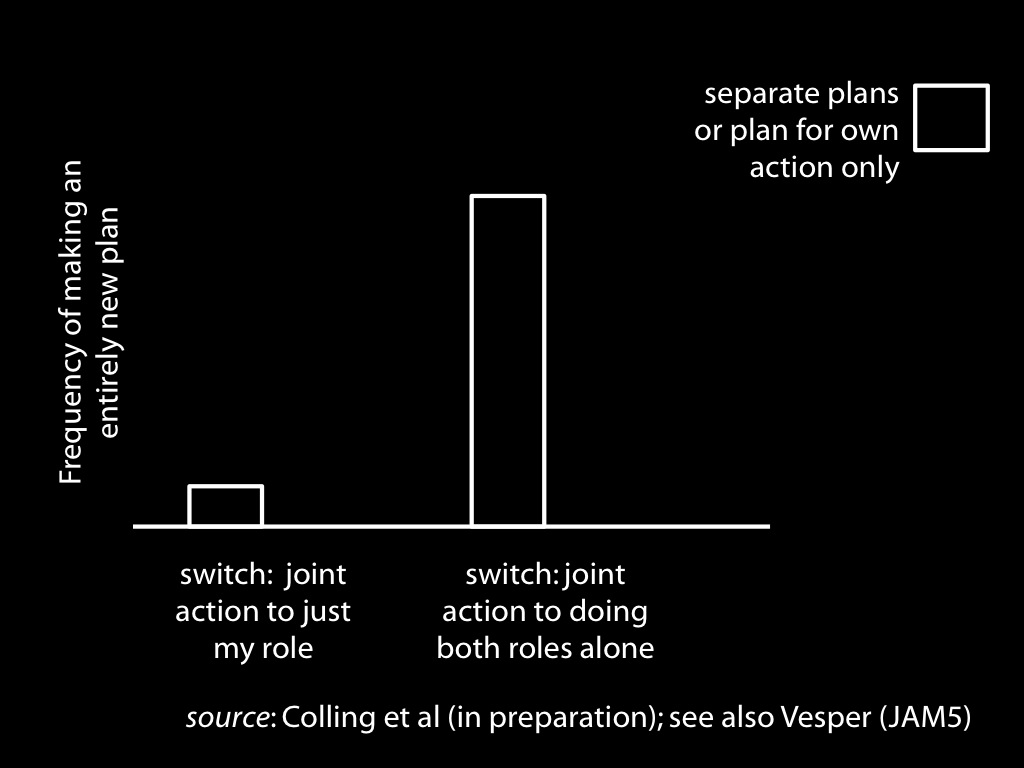
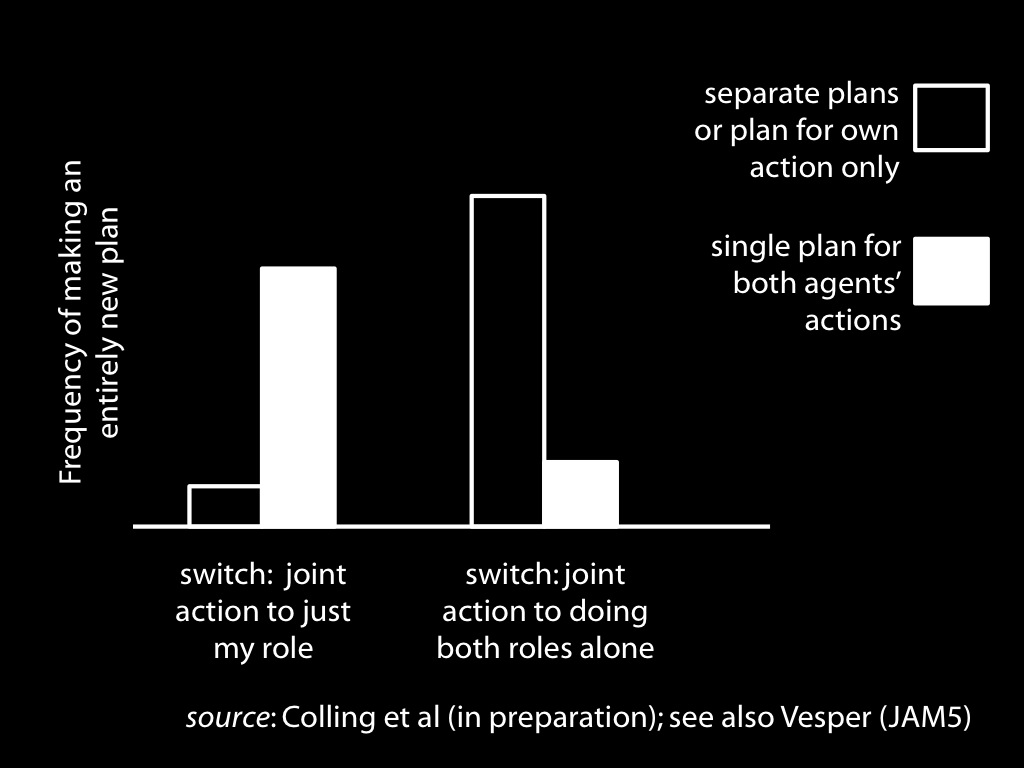
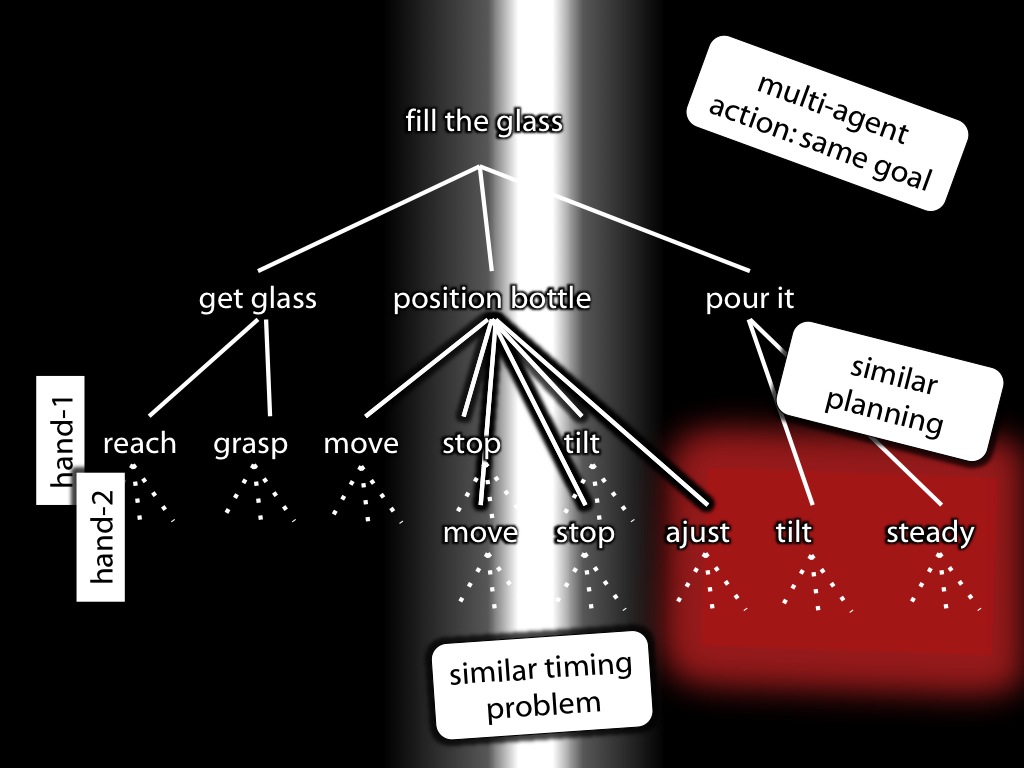
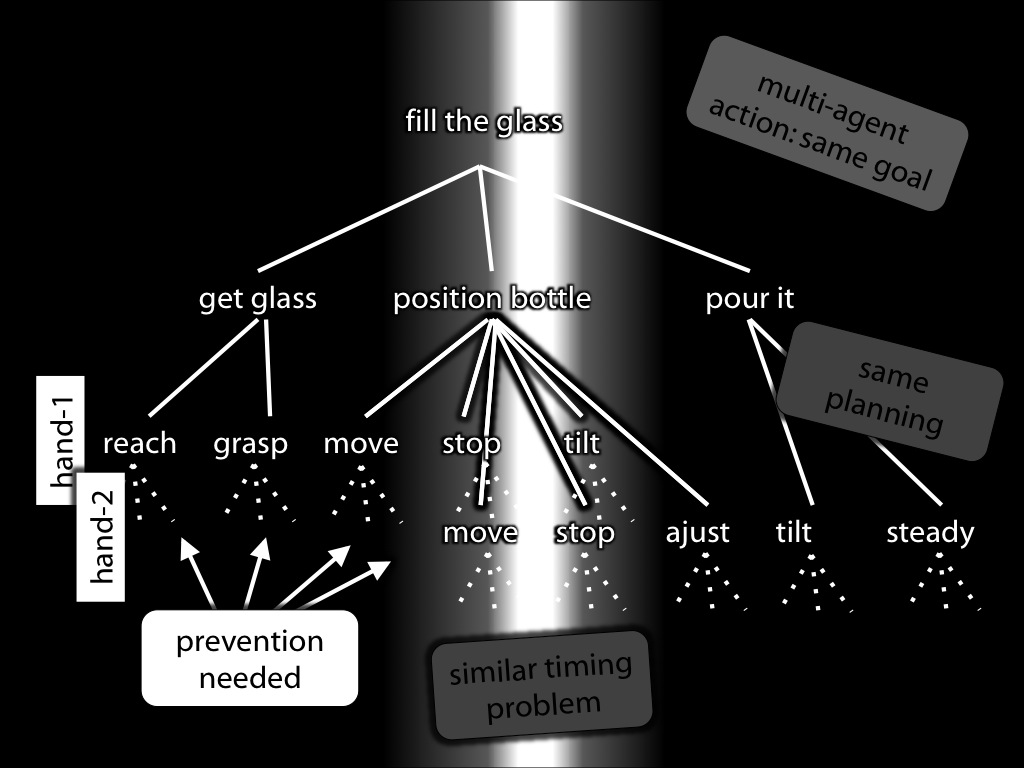
\item in each agent there is a plan-like structure of motor representations concerning each of the others’ actions,
\item each agent's plan-like structure concerning another's actions is approximately the same as any other agent's plan-like structure concerning those actions,
\item each agent's plan-like structure concerning her own actions is constrained by her plan-like structures concerning the other’s actions.
\end{enumerate}
So each agent’s plan-like structure of motor representations concerning her own actions is indirectly constrained by the other agents' plan-like structures concerning their own actions
by virtue of being directly constrained by her plan-like structures concerning their actions.
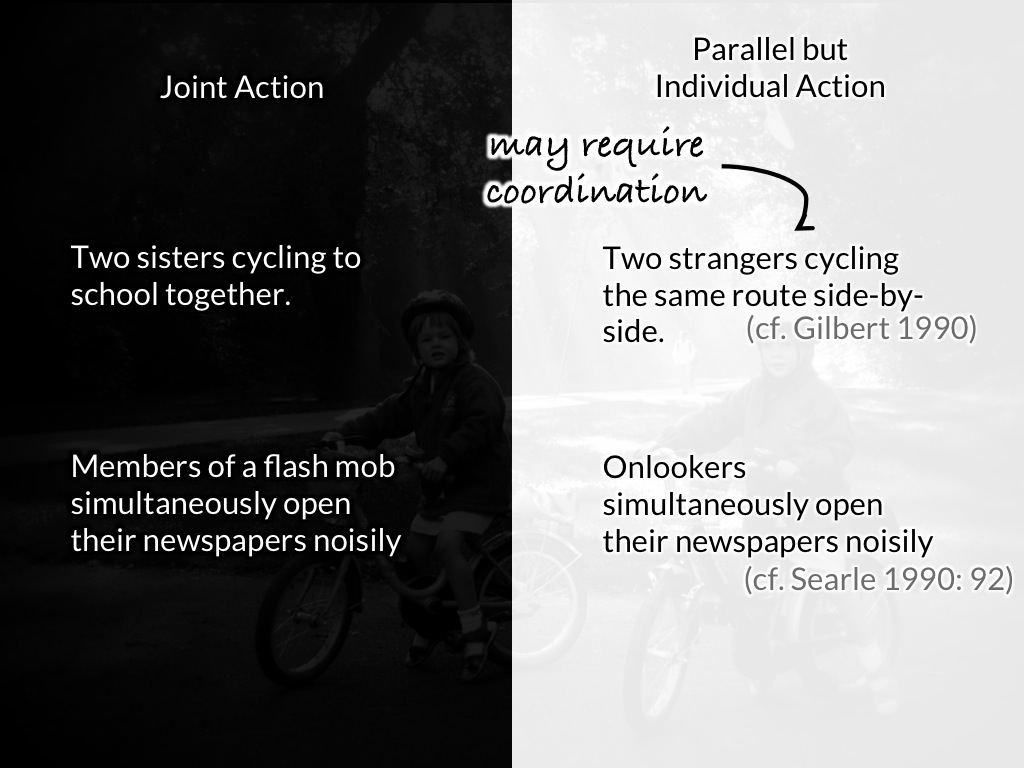
In this way it is possible to use ordinary planning-like motor processes to achieve coordination in joint action.
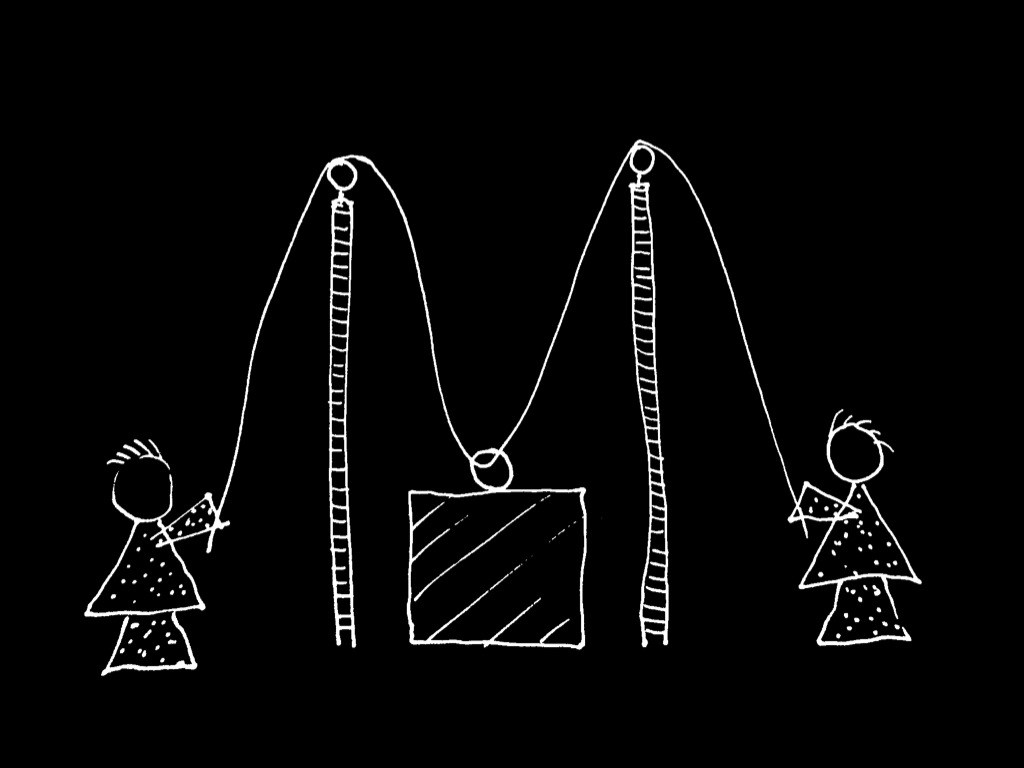
What enables the two or more agents' plan-like structures of motor representations to mesh is not that they represent each other's plans but that they processes motorically each other's actions and their own as parts of a single action.
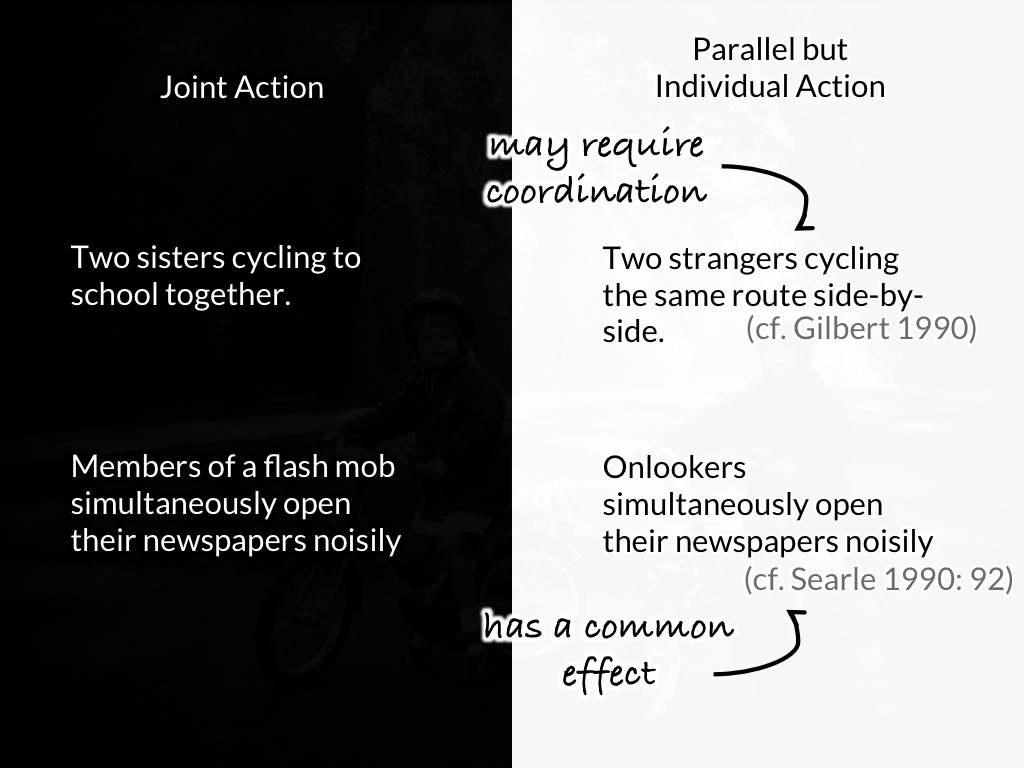
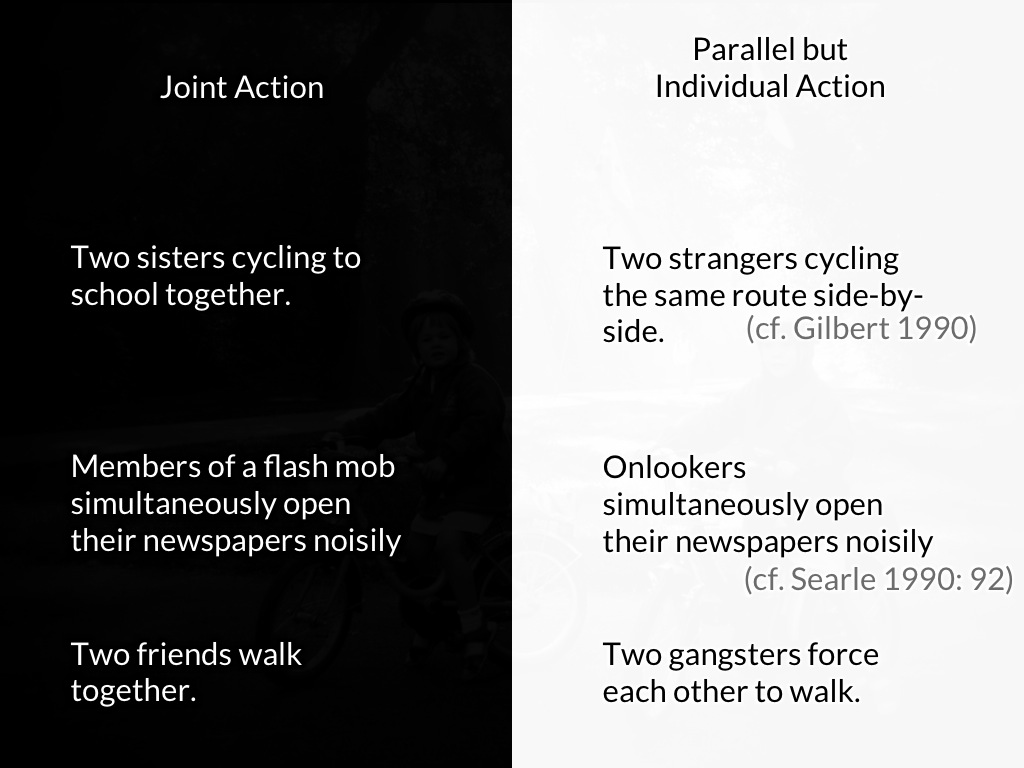
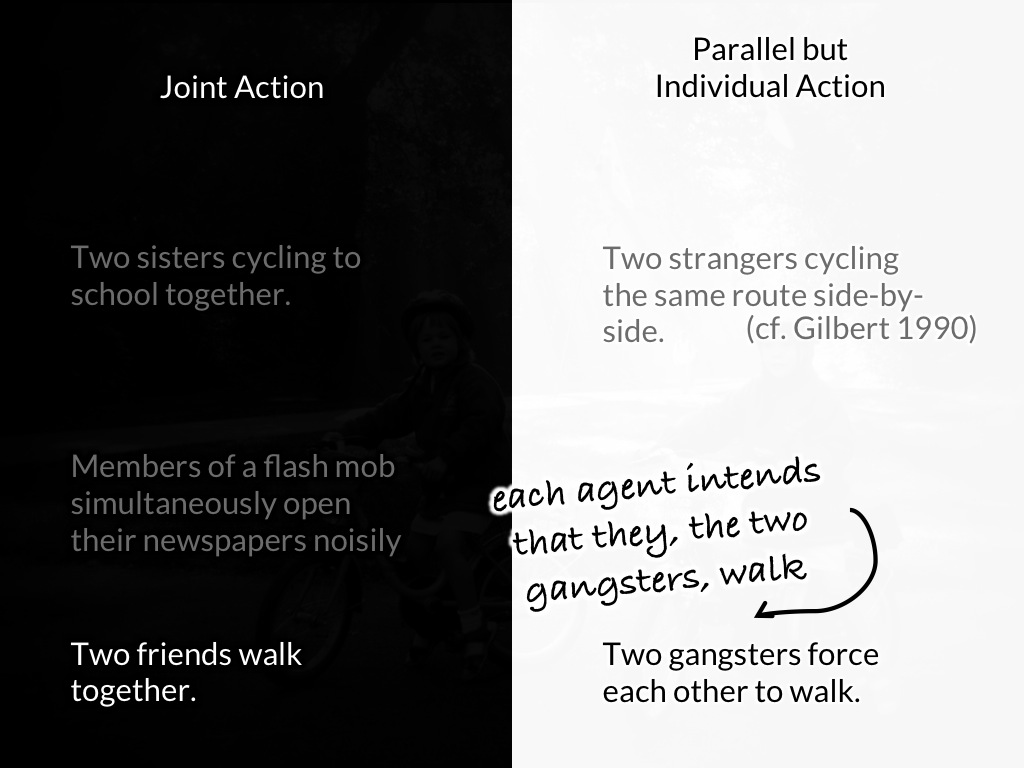
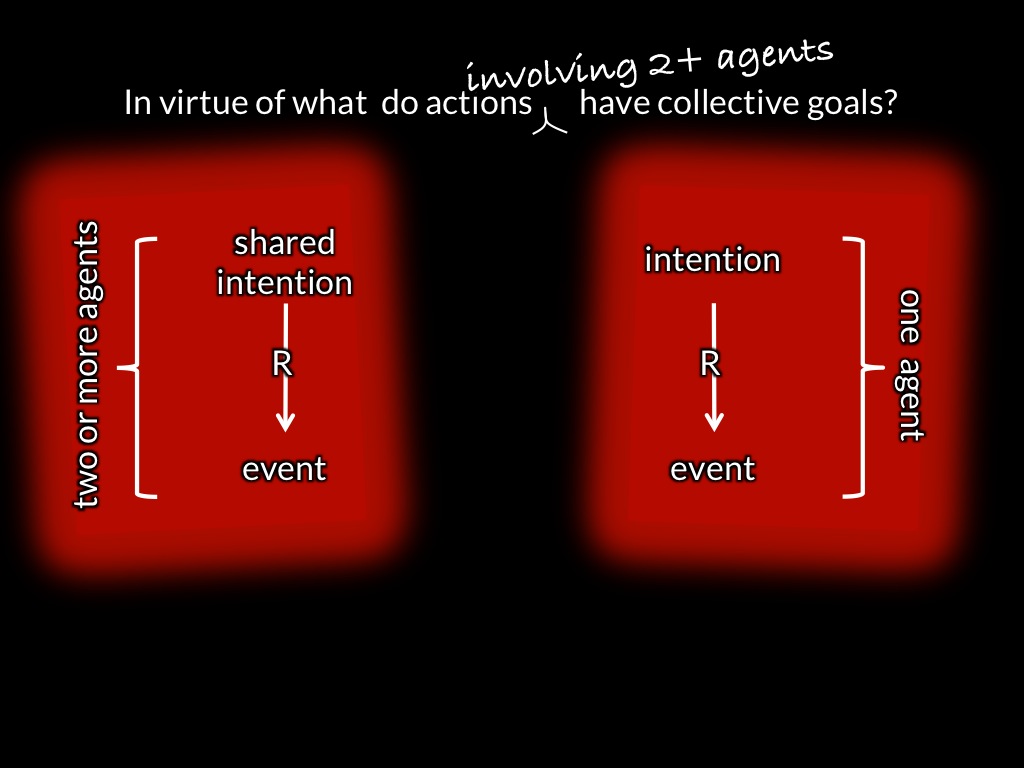
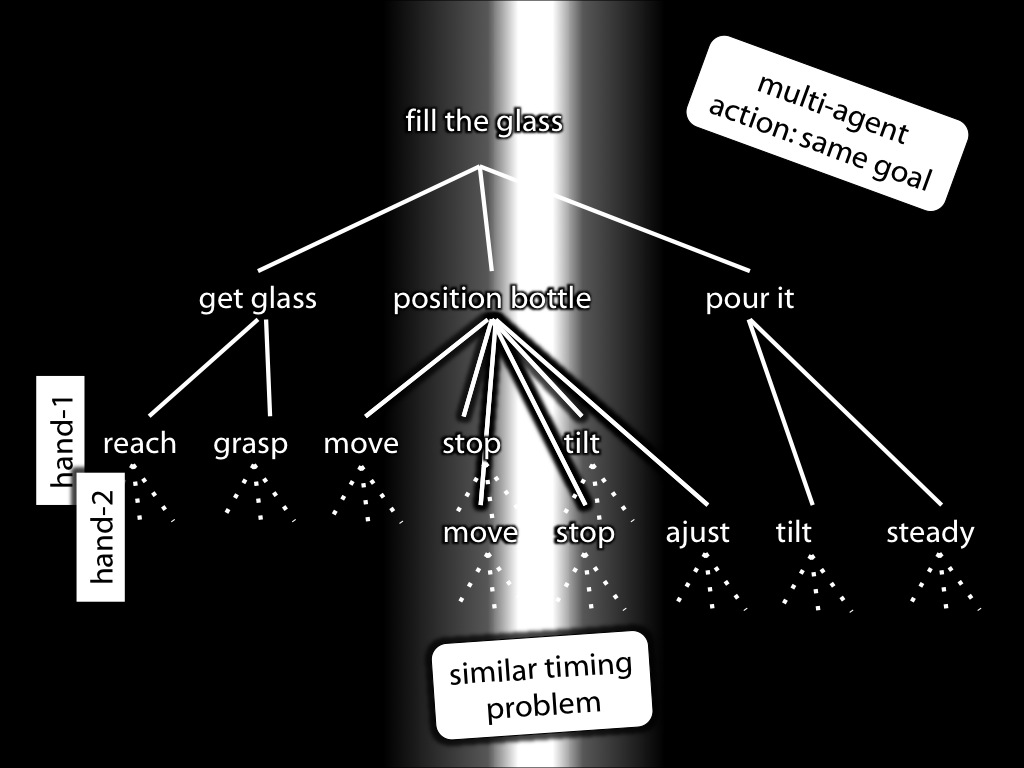
So how does the joint action differ from the corresponding individual action?
There are at least two differences.
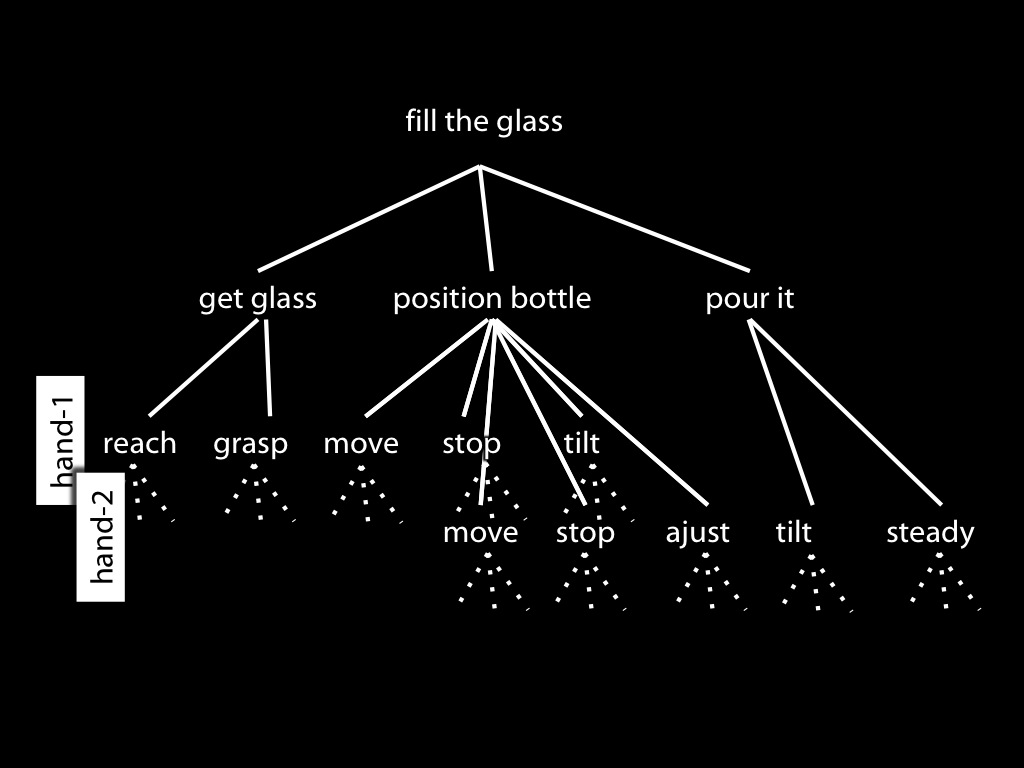
First, we now have two plan-like structures of motor representations because in each agent there is a planning-like motor process concerning the whole action.
These two structures of motor representations have to be identical or similar enough that the differences don’t matter for the coordination of the agents’ actions---let us abbreviate this by saying that they have to \emph{match}.
The need for matching planning-like structures is not specific to joint action;
it is also required where one agent observing another is able to predict her actions thanks to planning-like motor processes concerning the other’s actions (we mentioned evidence that this occurs above).